Vision-based speed detection at fixed locations (VISPEED)
Introduction
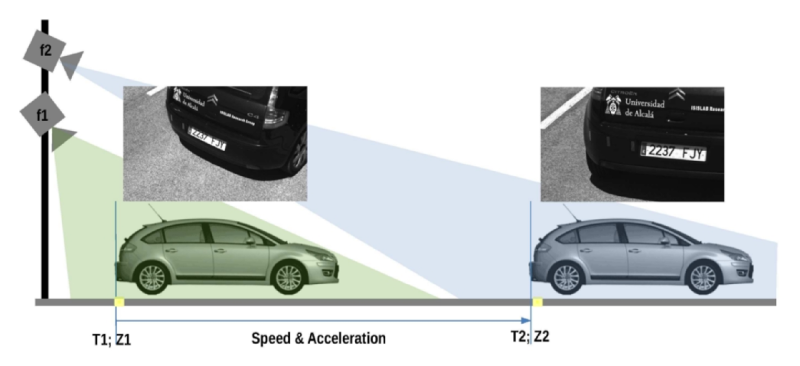
In this project we present a novel two-camera-based accurate vehicle speed detection system. Two high-resolution cameras, with high-speed and narrow field of view, are mounted on a fixed pole. Using different focal lengths and orientations, each camera points to a different stretch of the road. Unlike standard average speed cameras, where the cameras are separated by several kilometers and the errors in measurement of distance can be in the order of several meters, our approach deals with a short stretch of a few meters, which involves a challenging scenario where distance estimation errors should be in the order of centimeters. The relative distance of the vehicles w.r.t. the cameras is computed using the license plate as a known reference. We demonstrate that there is a specific geometry between the cameras that minimizes the speed error. The system was tested on a real scenario using a vehicle equipped with DGPS to compute ground truth speed values. The obtained results validate the proposal with maximum speed errors <3kmh at speeds up to 80kmh.
Sensor architecture
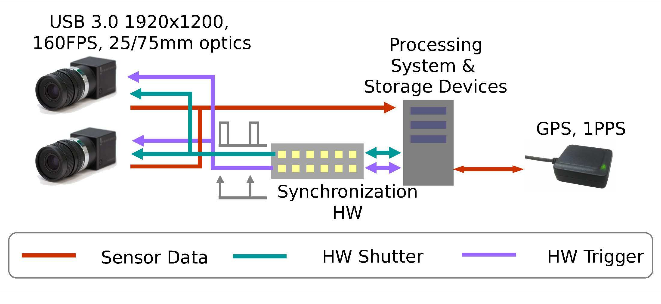
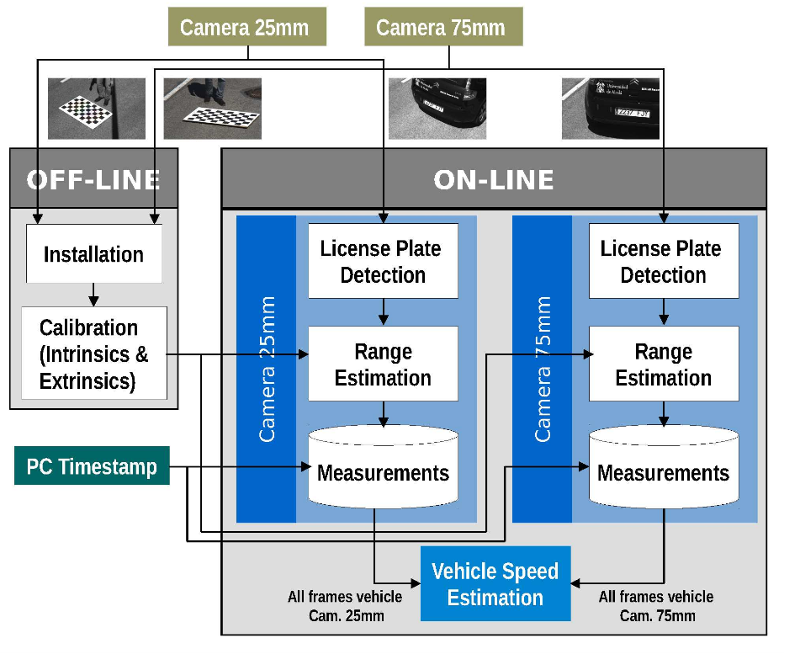
Two cameras with different focal length and orientation are mounted on a fixed pole pointing to different stretch of the road. The average vehicle speed is computed using pairs of relative distance measurements from both cameras. Vehicle detections are separated by a few meters unlike standard average speed cameras where these ones are separated by kilometers. Since the range error increases quadratically with the distance, and due to the narrow field of view of the lens, the system has been designed for monitoring one single lane (multiple lanes would require multiple systems). The overall architecture is composed of two CMOS USB 3.0, with a 1920x1200 pixel resolution, and a maximum frame rate of 160 FPS. The first camera has a focal length of 25mm and it is configured to detect the license plate of the vehicle as close as possible to minimize both range and pixel localization errors. The second camera has focal focal length of 75mm pointing to a second stretch (not overlapped w.r.t. the first camera) at a distance that will be defined according to a specific geometry that minimizes the speed error. A specific synchronization HW controls both the external trigger and the exposure time of the cameras. A PPS GPS receiver with USB interface that advertises NMEA-0183 compliance is used to run a NTP server (stratum 1) corrected by a GPSD time service. Thus, highly accurate timestamps can be provided to compute the vehicle speed and to synchronize the data of the vision system with the DGPS measurements on the test vehicle.
Vehicle Speed Detection
We use the license plate to compute the range of the vehicle since we have knowledge of its standard dimensions in world coordinates. After license plate localization we estimate the relative distance of it w.r.t. to the world reference by using the lower corners, and considering that the height of both corners is the same. In addition, we have previous knowledge of the distance between both corners in world coordinates.
The proposed approach is based on high-speed cameras (160 FPS). Accordingly, for each vehicle and depending on its speed we can have around hundreds of measurements at each camera. However, not all of them are used to compute the vehicle speed. Only pairs of measurements that fulfill the restriction to guarantee minimum speed errors are used. In addition, we have an accurate timestamp for each measurement because of the NTP server installed on the PC. Then, the final vehicle speed estimation is computed using the distance and the relative timestamps.
Results
In order to validate the proposed approach, we have devised a test scenario at the Campus University of Alcalá, using our fully autonomous vehicle, equipped with RTK-DGPS sensor, NTP-GPSD time service, and CAN Bus connectivity, among other sensors and actuators. The speed ground truth is obtained from the DGPS sensor by using Northing-Easting measurements with a positional accuracy of 2.5cm, which for the stretch of 6m involves relative speed errors <0.83%. Since the DGPS provides data at 20Hz and the cameras work at 160Hz, DGPS measurements were linearly interpolated to be synchronized with each frame of the camera, using the accurate PC timestamps that are given by the NTP client corrected by the GPSD time service.
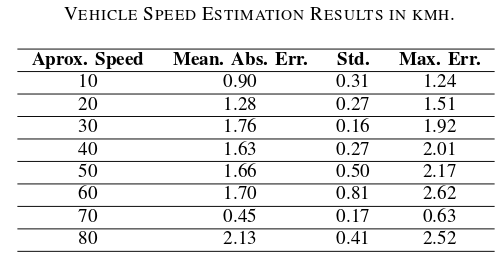
An experienced driver was requested to drive at a pre-defined fixed speed making use of the speed controller of the vehicle when possible. Eight different runs were made at eight different speeds {10, 20, 30, 40, 50, 60, 70, 80} kmh approximately. Speed errors were computed using ground truth data from the DGPS. Below we show the mean absolute speed error, the standard deviation and the maximum absolute error for each of the speeds. Note that the first column only shows the approximate speed of each of the eight runs.
As can be observed, maximum errors are <3kmh in all cases. The mean absolute speed error corresponding to all runs is 1.44kmh which clearly validates the proposed methodology.
Acknowledgments
This work was mainly supported by the Research Grants VISPEED SPIP2015-01737 (General Traffic Division of Spain)
Downloads
Citation
@INPROCEEDINGS{
LlorcaITSC2016,
author = {D.F. Llorca, C. Salinas, M. Jiménez, I. Parra, A. G. Morcillo, R. Izquierdo, J. Lorenzo, M. A. Sotelo},
title = {Two-camera based accurate vehicle speed measurement using average speed at a fixed point},
booktitle = {IEEE Intelligent Transportation Systems Conference (ITSC)},
year = {2016}
}